Wow, @vt1 , well done! And thank you for providing the background on how you arrived at the results. I’d appreciate it if you would add another column to your data table that shows elevation.
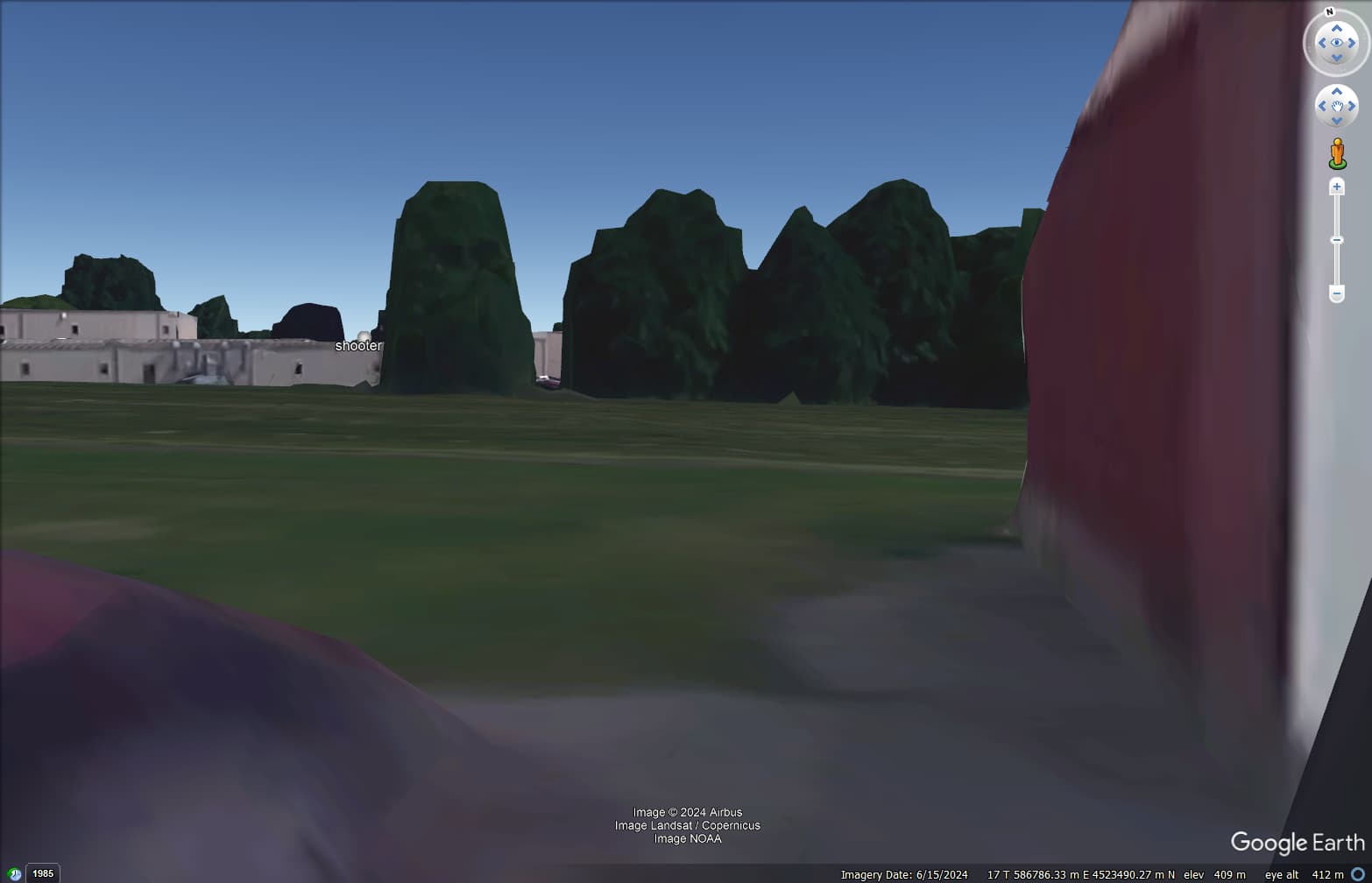
@rough_country_gypsy do you have a photo or video that shows AGR6 from the perspective of a person standing near the entrance to the North Barn? I’d like to know whether the tree blocks the shooter’s position.
Edit: A drone shot from the shooter’s perspective toward the barns would also be helpful. I looked back in this topic to see whether you had posted that. I found 6 YouTube links for your drone video clips, but none of these are from the roof of AGR 6.
Edit 2: Spa Guy drone footage @ 3:34 does a good job of addressing my question
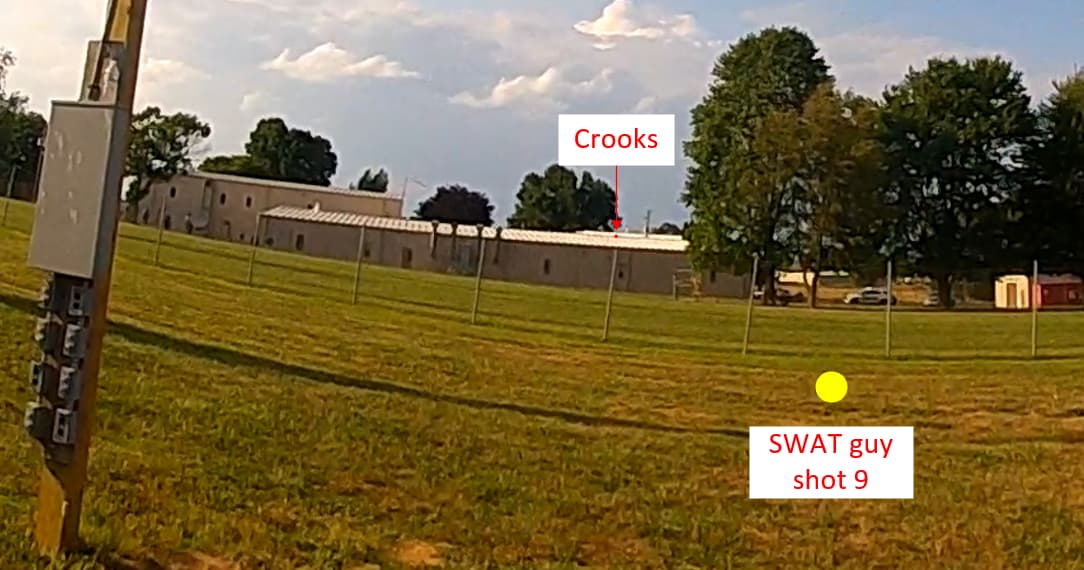
what just came to my mind here is the Higgins Preliminary Report. There he states:
“Shot 9 hit Crooks’ rifle stock and fragged his face/neck/right shoulder area from the stock breaking up.”
and further
“I believe the shot damaged the buffer tube on Crooks’AR. I won’t be certain of this until I can examine Crooks’ rifle, but I’m 99% sure, based upon reliable eye-witness ESU tactical officers who observed Crooks’ rifle before the FBI harvested it as evidence.”
Assuming his observations are correct, that somehow would rather support he first shot 3 rounds from a rearward/down position and then moved slightly to a forward/up position to release shot 4-8. There was a gap of about 2.8sec between shot 3 and 4, that would be enough to move something like 1.5 feet forward/up. He would then also be more exposed so the SWAT guy could see him better and take his shot 9.
Also Trump ducked down quite quick after shot 3 (about 1.5sec). Maybe Crooks couldn’t see his target anymore and therefore moved forward and a bit up to see better where to aim. And because he couldn’t make out Trumps red Cap anymore he went into kind of burst mode and released shot 4-8 pretty fast.
I’m not sure but would the spread of the ejected casings likely be bigger in case of fast fire? So maybe casings of shots 1-3 and 2 of shots 4-8 landed north roof side, and 3 of shots 4-8 landed south roof side.
a few weeks ago, @rough_country_gypsy flew his drone over the rally area and I stitched the images together with (the trial version of) ptgui (hence the watermark…), which results in the following base layout:
without changing the aspect ratio of your image, I have moved your image a bit to the right and a bit lower, and now it matches RoughCountryGypsy’s drone layout almost perfectly, updated orientation for your image (N, E, S, W, rot):
I have updated the kml file on @brian60221’s server and added the ground overlay (download File Browser and the images directory File Browser (make sure the images are in a directory called “images” in the same folder/directory as where you saved the kml file); use public/public if necessary).
I think something went wrong with the positioning of Drone Stage1, height 119m (I corrected the name to say cm instead of m, but that is not the point): this point is now located in the right bleachers instead of near Trump’s stage…
your position for crooks is also a bit too far away from the parking side…
the “DRONE STAGE1 height 119cm” point maps on the right bleachers and should move more towards Trump:
I used the following renaming scheme for the labels:
.replaceAll(Pattern.quote(“Snipper”), “Sniper”)//
.replaceAll(Pattern.quote(“@”), ", bullet “)//
.replaceAll(Pattern.quote(“shoot”), " “)//
.replaceAll(Pattern.quote(”_”), " ")//
bottom line: the positioning of your labels makes much sense, but I believe they are a bit off for
the stage and bleachers area when we look at the imho very accurate footage of RoughCountryGypsy’s drone…
the position of crooks is a bit too far from the parking side when we compare with the location of his body:
so, if you agree with the shift of your layout image as suggested above, I think it will be quite easy to finetune the coordinates of the points of interest of the bleachers, stage (and roof of AGR building 6, but this is unrelated to the shift)…
Here is the drone image. I think it’s in the best location for me. I used all the vertical lines from the white tents, the barns doors and light poles to estimate that position. All the vertical lines converge to the point of perspective where the drone took the picture.
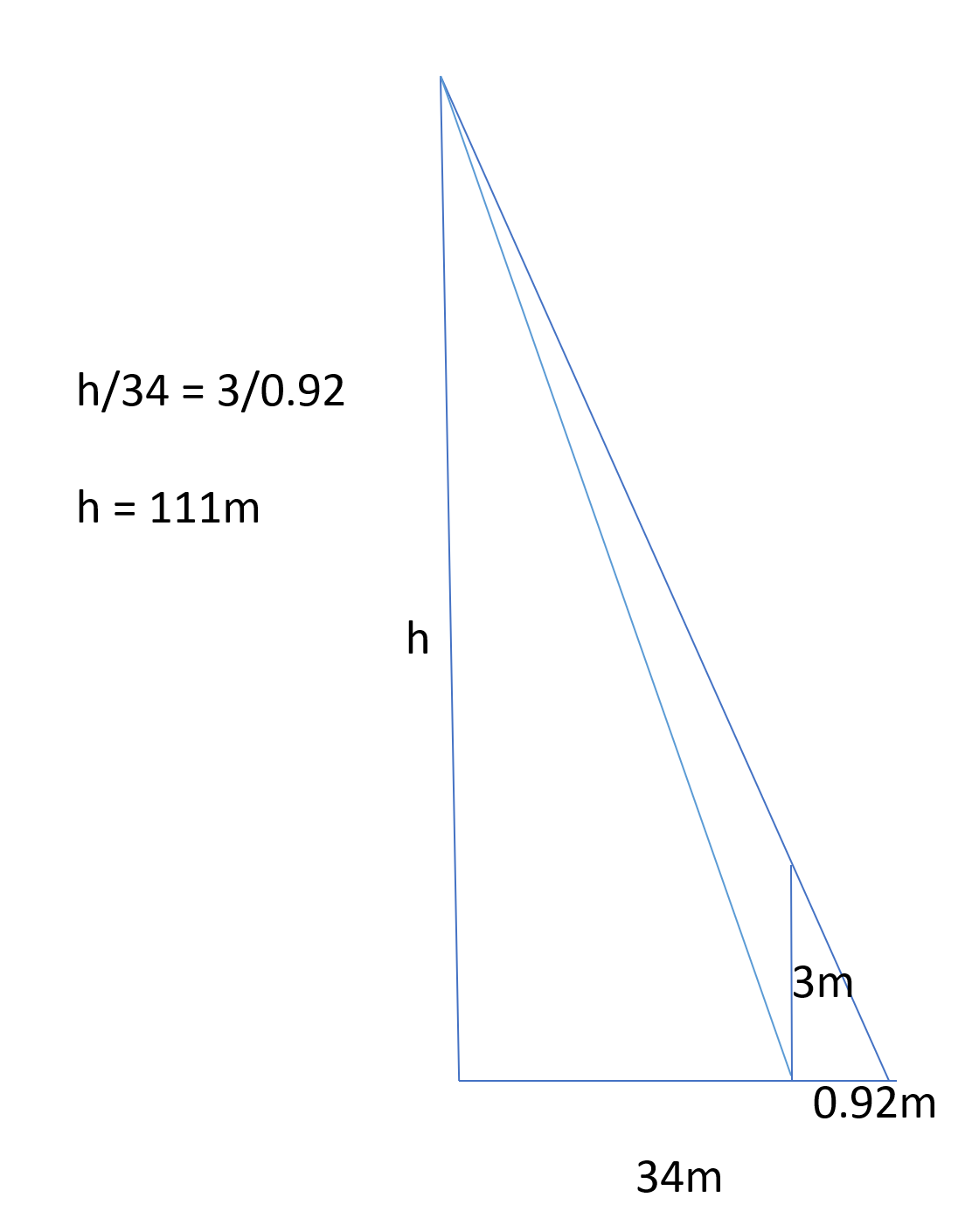
This is how I know the elevation, because considering the height of the side of white tent (3m) I can trace back to drone elevation.
This dimension in red is 0.92m and the yellow dimension is 34m. Considering that the tent height is 3m it possible by triangle similarity to calculate the elevation of the drone.
This estimation resulted in 111m, in other cases I achieved higher results. I considered the medium of them all that resulted in 119m.
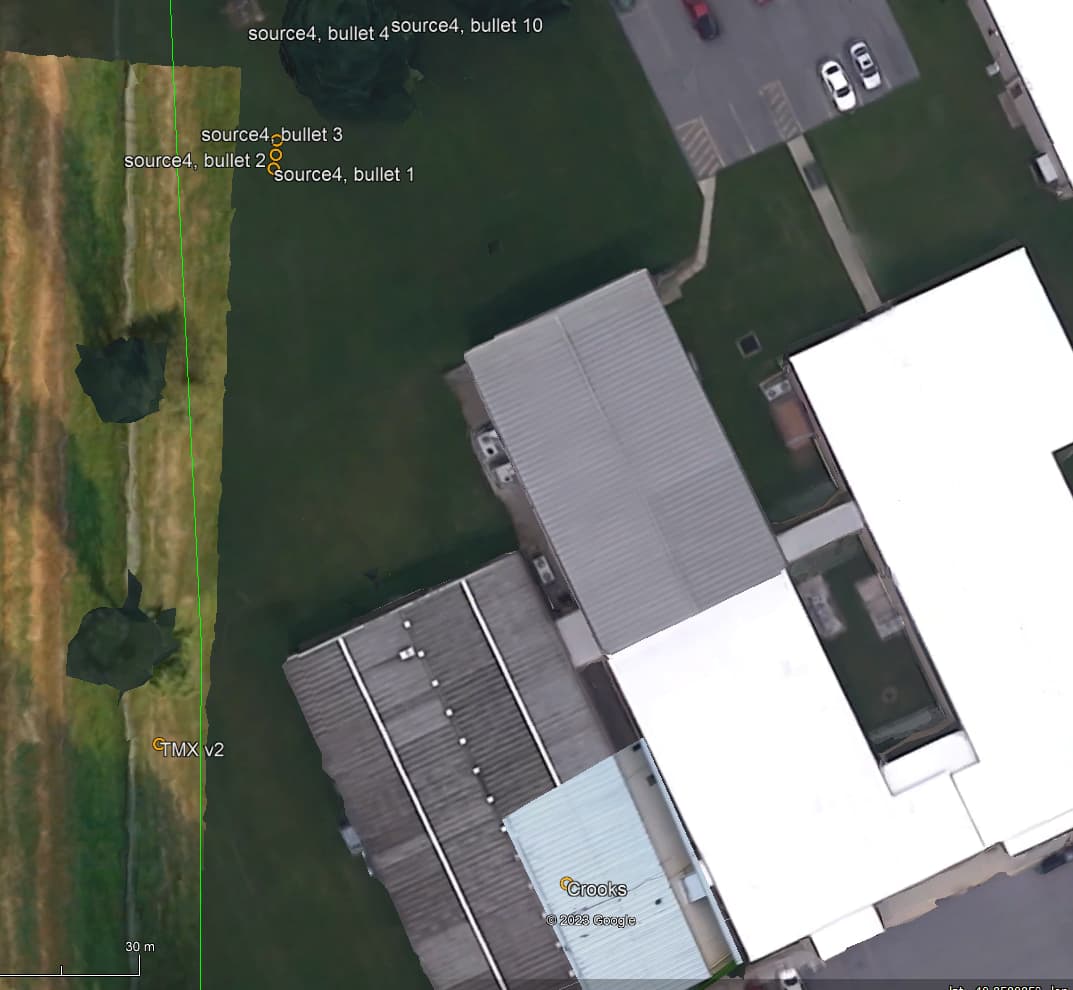
This way now I can do the reverse and with a known elevation correct the bleachers and the teleprompter positions. Note that all the Bleachers in blue rectangles also trace back to the point of perspective. Also, the resulted bleacher in blue is a perfect rectangle with right angles and the sizes of the North (13.6x5.97m) and South (13.6x5.92m) bleacher are almost same.
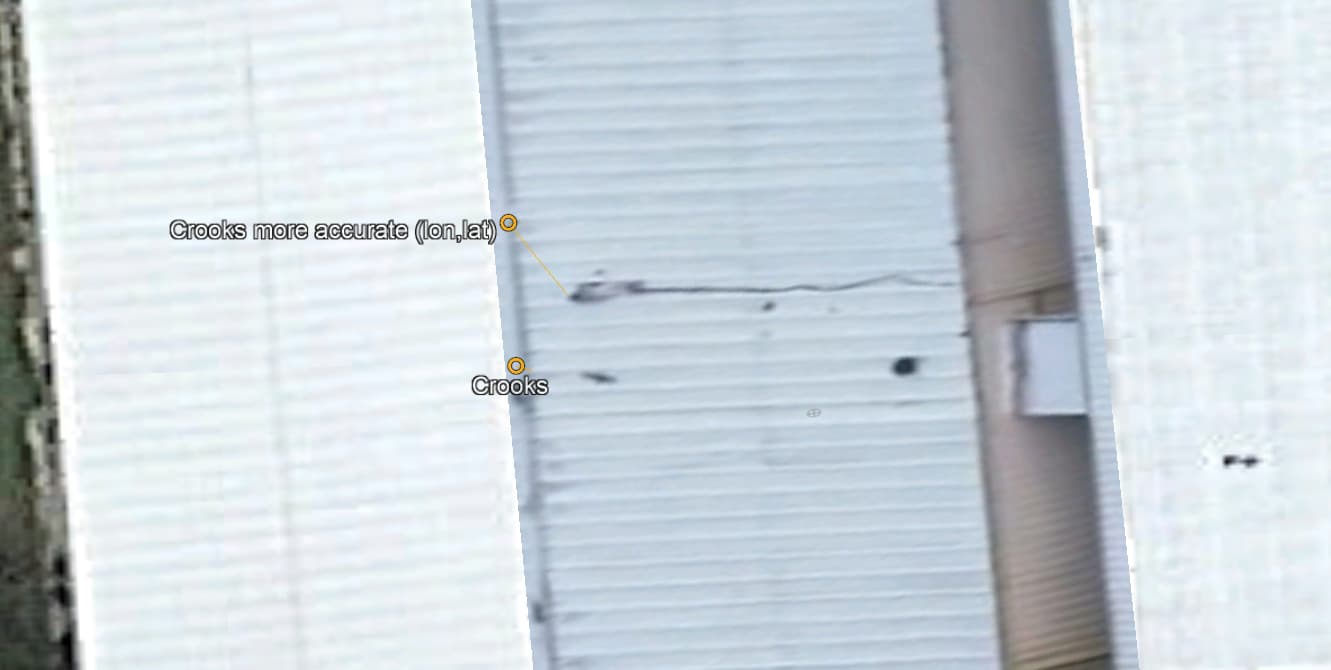
For Crooks position I used the correction for elevated positions, which dislocate his position on the roof 1.5m to East because he is around 3.8m in elevation to ground.
This will happen to any roof in the satellite image. As you can see the east side of the building is due to the satellite not been exactly vertical to that location, but at an angle close to 24 degrees.
So, any geolocation in an elevated position to ground must be corrected. Also, you can see the projected image of the south wall dislocated to East for the same reason, in this case the dislocation is 1.4m to East. This makes a lot of difference when trying to make lots of images from the same footage result in the same location.
Also, I always use the 05/11/2021 satellite image, because the most sharp and clear image.
Looking more in to this, 3D building may compensate the satellite distortion, but the images used in 3D is probably the 14/06/2014. That is not a good image. So I prefer to use the 2021 image more clear and sharp lines.
I think I did explain accurately the elevation correction.
When you superimposed the photo on the roof the photo is in the wrong geolocation because the roof is the wrong geolocation.
Let me prove this:
If you look on the East side of the building you will see the side of the building. That means the satellite picture is not perfectly top down. But inclined from the East. Also, by definition the edge the wall is vertical so any point on South East edge must have the same geolocation only with different elevations. But in this satellite picture it is not.
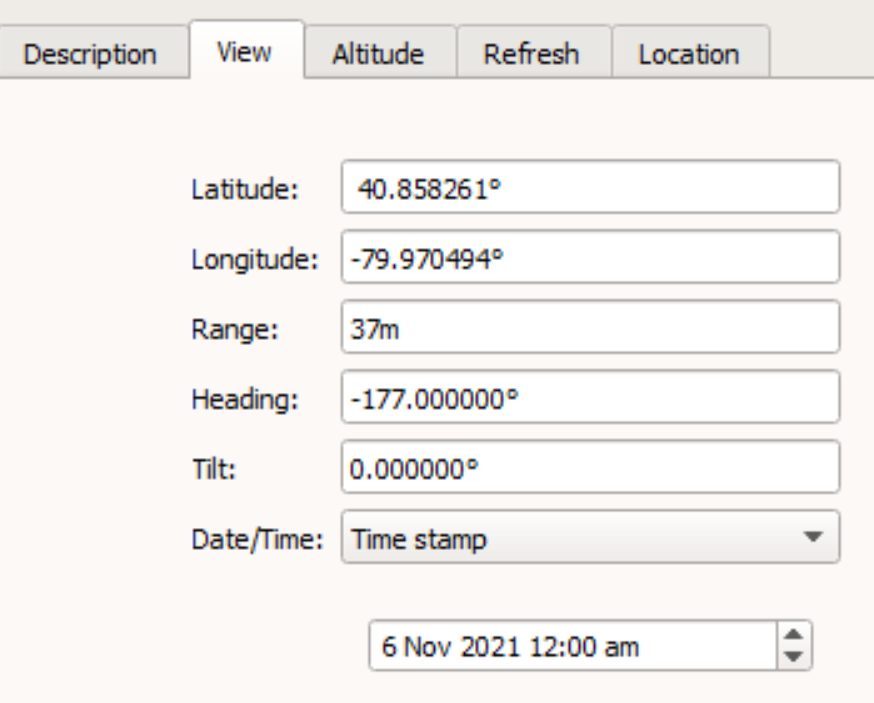
These are the geolocations of those reference points:
B6_SE_roof: 586778.46; 4523517.22
B6_SE_ground: 586779.86; 4523517.22
So which one is the right one? I consider the soil position to be the correct one and the roof position to be the wrong one. The roof geolocation is dislocated to the West by 1.4m in my measurement. That means the geolocation of the roof on that edge must be corrected 1.4m to East.
Crooks elevation is 3.8m in my estimations, so the correction must increase in the same proportion that results in 1.75m correction to East.
Since the correction varies with the elevation the superimposed picture is not correct at all points in the roof also, because the roof is inclined.

















{kind=link}