what do you mean by troublesome?
do you find internal consistency between the group of 3 and 5 in the set of 3+5+1+1=10?
what do you mean by troublesome?
do you find internal consistency between the group of 3 and 5 in the set of 3+5+1+1=10?
May I suggest a simple method?
You should change one of the coordinates and keep going into that direction if the result gets better. Then take a next candidate.
This is my example on bridge resistance reverse engineering.
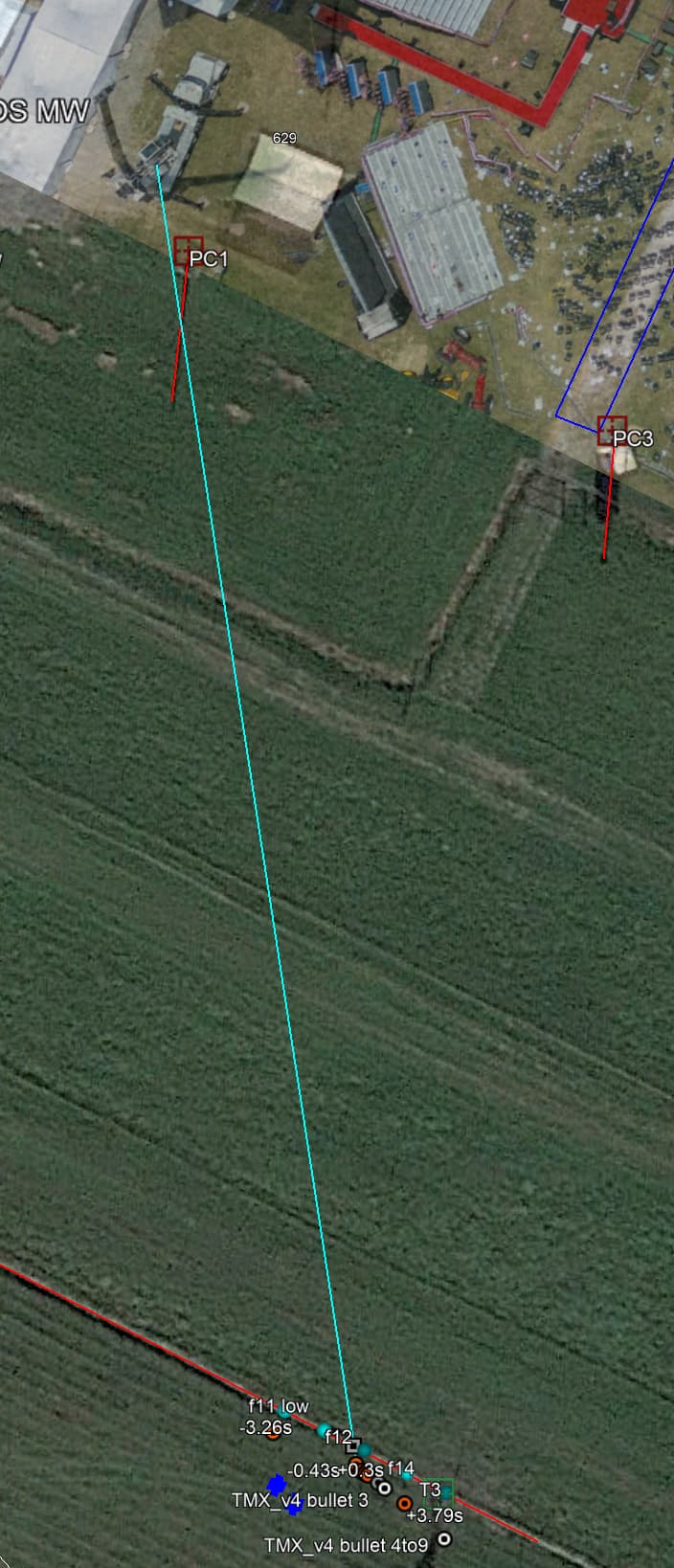
Yes, it’s the crane used to hold the big flag.
I used its alignment to estimate the frame of -0.43sec to the first shot.
I also used the chairs in blue that I found the geolocation from another video to use as a reference from some frames that those chairs appear.
Since I have first frames very still, I could calculate the angle of view of the camera which is 5 degrees on the smallest dimension. Also I could verify that angle of view or zoom of the camera does not change during the footage.
This way if a I can previously estimate any dimension on the frames, like the size of the fence grid (2’’ to 2.25’'), I can estimate the distance of the object to the cellphone. In the case of the -0.43sec I estimated 1.3m away from the fence.
In these frames the conversion of angle of sight to pixels is almost proportional because the tangent of a very small angle is approximate to the angle in Radians. That simplifies a lot of calculations. In wide angles of view the location of the object on the frame will result in different conversions if the object is in the middle or the side of the footage frame.
Also, with the relative vertical size and horizontal size of the mesh is possible to calculate the angle of the line of sight (line cyan) to the fence (line red), in that case is close to 53 degrees.
Would you please summarize your findings? Most importantly, do they support the theory of two sets of locations, meaning two shooters? And if so, where? Ty!
Yes. Those all look very good, but I did do some tweaks to the @vt1 positions of TMX for shots 2-8 to get converge better. For example:
586727.26-0.6, 4523504.62-0.5 %TMX at Shot 8
Looking at the TMX video, there seems to be a little bit of cameraman movement between shots 8 and 9, but not much. However, I found it necessary to tweak the position at of TMX @ 9 like this
586727.26-1.5, 4523504.62+3 %TMX at Shot 9
in order to get TMX to align with the other recorders, improving the error from 3.8 m to 0.9:

But that means that TMX would have moved 3.6 m between shots 8 and 9, which seems unlikely given the video evidence. So, that’s what is troublesome.
Yes, that’s the method I have been using to refine the recorder positions, but your suggestion has prompted me to try something new. Keeping shots 8 & 9 together, I’ll use Matlab to try all the lat/lon positions over an XY grid to find where the error is minimized.
When I understand that the sound analysis does not correlate to the geolocation’s estimations, my though process is that there is room for improvement in those geolocations, but I will not try to move a position to fit the sound analysis.
Also looking at NTD and Podium time differentials they should not exist because both of the receivers are still. Yet there is 0.002sec differences in some cases that results in 0.7m of error.
I’m trying to find the reasons for that error.
Time line of a shockwave from the report is in the microseconds when the bullet leaves the muzzle. Here is a video that explains the shockwaves:
 - Smarter Every Day 203")
Here is the shockwave of the report from this video.
The frequency of the of the audio sample is 44.1KHz, it can’t barely capture the report shockwave. But I’m guessing that a shockwave will reverberates in the microphone for it to be captured.
Also, the shock wave might have a lot of small reflections from the ground that would appear.
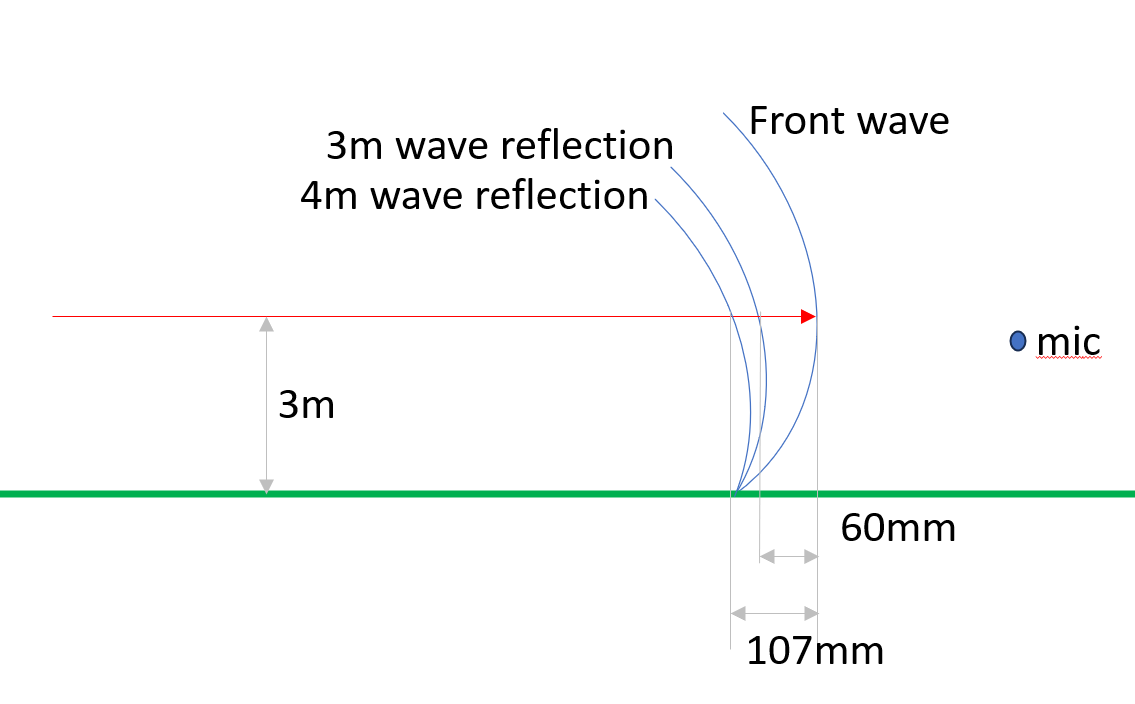
Considering podium mic elevation of around 3m and a parallel to ground bullet trajectory the reflection from the ground would come at 60mm in delay in my calculations, or 0.170 milliseconds after. Since the bullet is traveling at higher elevations (4m) there would also have 107mm in delay reflections, or 0.304miliseconds after. Since these reflections occurs on grass there would be a dissipation of the shock waves reflections, this is hard to tell but would appear in the mic in the milliseconds range.
Here is a rough representation of that:
My questions to sound experts are:
1 – Does the size of the first shock wave (8mm) tends to increase in large distances like this (more then 150m)? In theory it would not, but nature is not theory.
2- The microphone of a camera (44.1KHz audio sample) will reverberate small pressure differentials (20 microseconds or less) or it will miss to capture that? If that is the case then what we hear are only the reflections that are more wide spread.
3-@greg_n when you select the report time, you select the peak measurement or there is a method?
Hi @screener. To be clear, the geolocations cannot tell if there was a second shooter, but gives base for audio analysis that will.
Here are the latest posts I made about geolocations:
Would you please group shots 4-9 as dots on a map, so we can see where your work would lead us to believe the shots were taken from? Ty!
I have been following the post, and it is so in the weeds that I thought I would survey where participants were on the big picture. So here goes:
NUMBER OF SHOOTERS
CROOKS ROLE
LOCATION OF POSSIBLE 2ND SHOOTER
could you change the first question and have it 4 options?
slightly more elaborate comment below…
the past few days, I have collected Vt1’s and Greg’s coordinates and put them in a kml file: //barf.bz/files/howdoiknowthisinfo/kml/points.of.interest.20240925.kml is the current version.
if it is the first time you download this file, you will also have to download the images folder with its content to the same folder/directory where you put the kml file: //barf.bz/files/howdoiknowthisinfo/kml/images
if you never visited that server you may also need public/public to get access…
I select the very first place where I can see the sound rise up from the noise. This stems from my background in radar signal processing where we found that the leading edge of the pulse was the best place to register the time of arrival. However, you make some good points. The propagation of the sound from a gunshot is very complex, and my current approach may not be the best. So, I should consider other methods.
@offtheback , are you also doing TDOA analysis? If so, what approach are you using to register the time of arrival on each gunshot?
phrasing the questions and options for this sort of surveys is very delicate…
as I mentioned some time ago in a previous post, the term “2nd” shooter implies a lot…
it implies that
the first question should have been changed to reflect the two cases of who the first shooter at Trump would have been:
and the third question should not refer to the “2nd” shooter, as if crooks did not fire any rounds, the “2nd” shooter would have been the actual/first/single/lone shooter, and thus not the “2nd” shooter…
@greg_n I have a post about ready on my methodology. a) I look for the boom signature in the 100’s of Hz frequency range. In some cases, this means applying a pre-filter to reject other frequencies so I can see the pressure wave clearly. b) For each source, I line up the waveforms for all of the first eight shots in a waterfall and shift them until I see a best match. I try to estimate the leading edge of the first positive pressure pulse for each shot from that, so that I am consistent from shot to shot. I am getting very accurate results for the stationary sources. This PDF has my waterfall alignments for the sources I am currently using.
shot alignment all sources.pdf (2.8 MB)
I will hopefully be able to post more tonight, including my estimated arrival times.
It would seem inappropriate to change the questions after people have voted.
which is why I suggested it as soon as possible and before anyone had cast a vote…
I am quite sure nobody would object rephrasing the questions in a new poll and deleting the previous poll…
Here are my latest corrections to DJStew positions.
| reference | Longitude | Latitude |
|---|---|---|
| DJstew sees Crooks | 586771.79 | 4523486.75 |
| DJstew bullet 1 | 586774.15 | 4523486.16 |
| DJstew bullet 2 | 586775.89 | 4523486.19 |
| DJstew bullet 3 v2 | 586779.23 | 4523487.25 |
| DJstew bullet 4to9 v2 | 586782.39 | 4523487.97 |
| DJstew bullet 10 v2 | 586775.48 | 4523489.88 |
| Tree 1_v2 | 586775.18 | 4523490.52 |
The tree trunk position (in green) was wrong by about 1.8m. This occurred because I tried to estimate the satellite possible position of the tree trunk. Now I used 3 footages to estimate the positions of the tree (in green) and the picnic table (in red).
I also used the fence poles that are identifiable on the satellite. This fence behaves almost like a ruler to measure and position objects.
From the positions of the picnic table and from the line of sights (in blue) from source 4 to DJStew, I adjusted the positions for bullet 3 and 4to9. And from the position of the tree, I adjusted the position of bullet 10. The positions shifted from 1 to 2m.
Hello,
I’ve been following the news about the attempted assassination of Trump on X (Twitter) since it began, but unfortunately, there are far too many bots on X, making it difficult to conduct a proper investigation.
A friend recently mentioned this forum to me, and I decided to join today.
I’m considering analysing the impact of the bullet that struck near the corner of the bystanders. There’s plenty of video footage available on X (formerly Twitter), such as:
Click to see post: Moshe Schwarz on X
And this one as well.
Click to see post: John Cullen on X
My question is, has anyone so far identified the actual bullet impact position on the bystanders? One would assume that after the shooting, this impact would be visible in some of the footage?
Before I continue sifting through all the videos on X, I was hoping someone might have already located the impact point and could share this information with me.
Thanks!
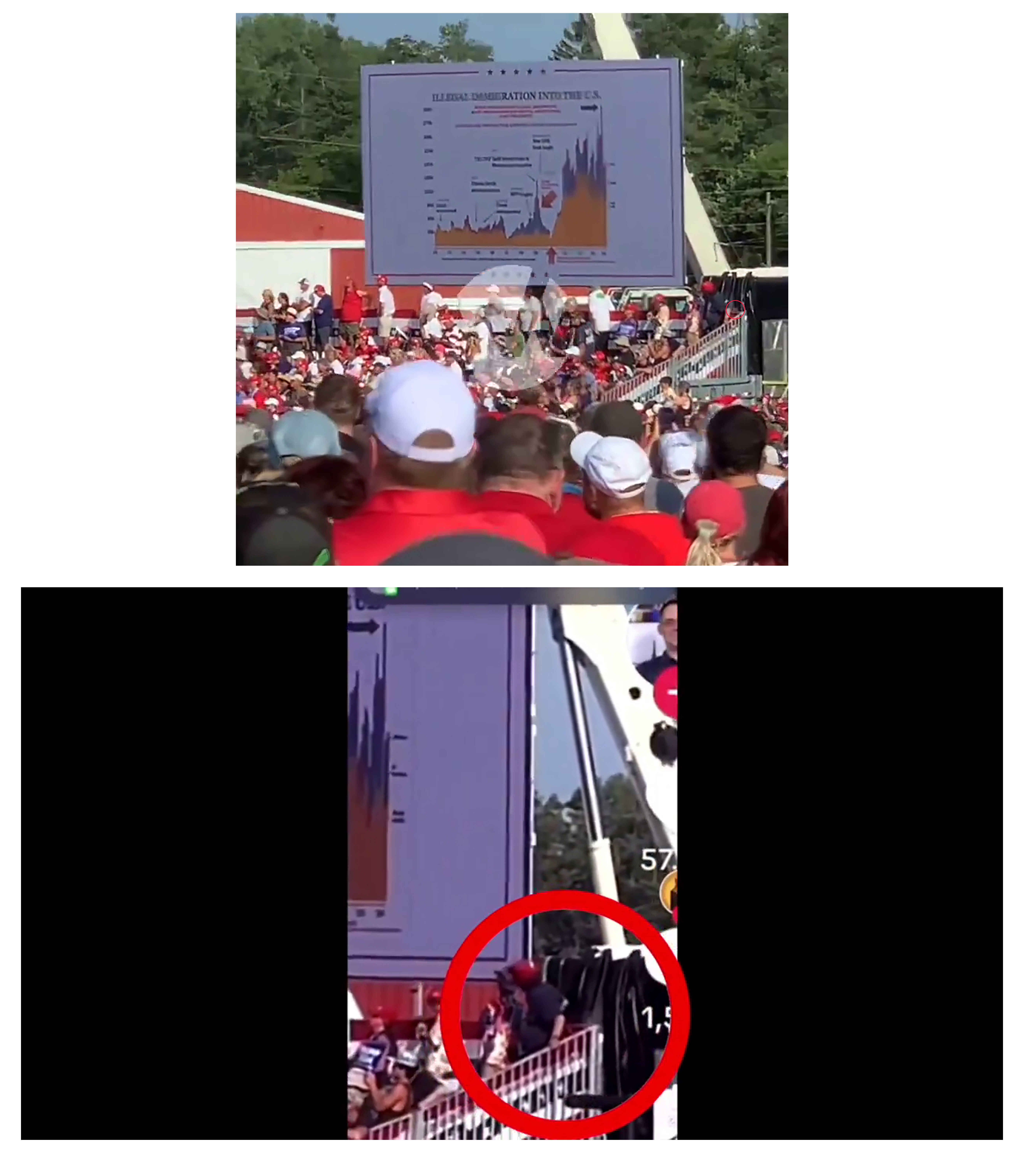
I posted this a while ago:
This is the closest photo I got for the location of where the bullet hit.
I still, to this day, cannot find the bullet hit in that photo.